Hi,
Its awkward cabling wise, but it is possible to use KSTEP or 3rd party Step/Direction drives with Kanalog. It just requires special wiring so you lose some of the plug-and-play aspects of KSTEP and the extra KSTEP IO. KSTEP is basically just a 4-axis Step/Direction drive. So using 3rd party or KSTEP drives is an independent decision.
I recommend purchasing differential encoders. They can be used with single ended inputs, but if you decide later on using differential you have the option. There are also 3rd party modules to convert differential to single ended.
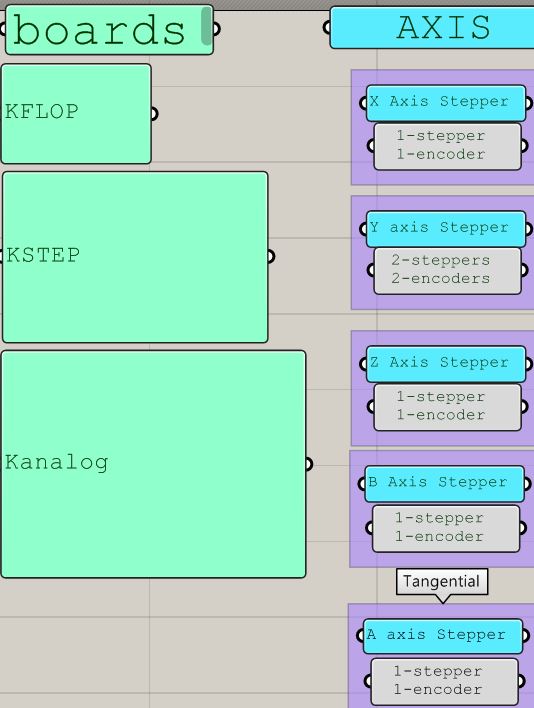
So one solution with Kanalog, 6 Step/Dir, 8 encoders might be:
For 6 Step/Dir Generators
KFLOP JP5 provides 4
The Mux Option Provides one on KFLOP JP4 and one on KFLOP JP6
For 8 differential encoders:
Kanalog provides 4 differential inputs that enter KFLOP JP7
Kanalog provides 4 more differential receivers that can be re-wired from Kanalog JP9 to enter KFLOP JP6
Regarding Slaving: From a Hardware perspective they should be wired as separate axes. Then slaved in the configuration. See:
http://dynomotion.com/Help/ConfigurationScreen/ConfigurationScreen.htm#Master/Slave_Settings
HTH
Regards
TK
| Group: DynoMotion |
Message: 8828 |
From: andy.brman |
Date: 12/27/2013 |
| Subject: Re: 5 Axis CNC with 6 Steppers |
Tom, Thanks for the quick reply...plus all the good information. you mentioned "So using 3rd party or KSTEP drives is an independent decision." >>> I would prefer to use the KStep for at least 4 of the steppers since I have it, and I like its characteristics (performance/cost ratio). so that brings up some questions: 1. I don't understand how I could get six differential encoder inputs if I do use the Kstep in the mix. I was thinking that JP2 would need to provide at least 2 of the 6. (but I am not sure about that)
2. Is it crazy to think that running 2 Kflop boards could simplify things? my thought is that rather than buying additional 3rd Party drivers for the steppers not covered by the Kstep... I could purchase another Kstep. This would mean I would set up Kflop 1 to run Two Kstep Boards, and Kflop2 to run the Kanalog board that I have. I know this would be overkill by at least 2 axis and heaps of I/O that I would probably never use... but it seems way cleaner in terms of setup and possible modifications down the road.
3.If question 2 makes any sense, what sort of additional complexity would I be taking on in terms of programing to get a system like this working. I did read through this help page about multiple boards
http://dynomotion.com/Help/MultipleBoards.htm
it mostly deals with setup of hardware.. I am curious C programs and KmotionCNC work with multiple boards.
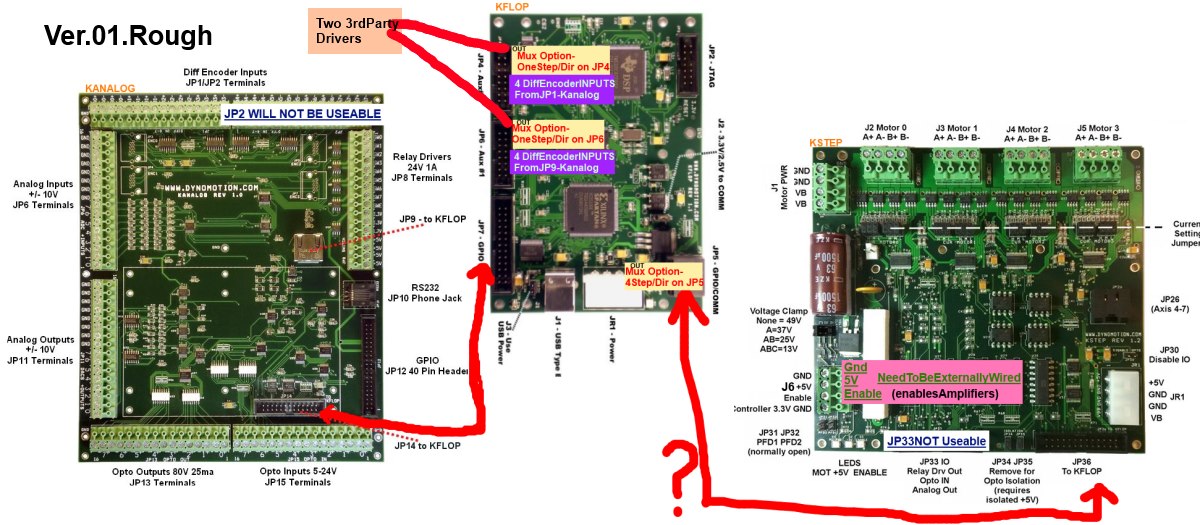
Back to question 1.. I included a hacked together diagram of connecting a Kanalog,Kflop, and Kstep for my needs.... as I understood it from your description. Can you let me know if it seems off...
Thank you so much for helping me wade through this complexity,
Andy
|
|
|
@@attachment@@
|
| Group: DynoMotion |
Message: 8829 |
From: Tom Kerekes |
Date: 12/28/2013 |
| Subject: Re: 5 Axis CNC with 6 Steppers [1 Attachment] |
Hi Andy, Using 2 KFLOPs would complicate things. It would be difficult to coordinate things between the two boards. KMotionCNC only works with one board at a time. Regarding your diagram: #1 Step/Dir inputs to KSTEP can be connected to either KSTEP JP36 or JP26Connect. So for simplicity sake connect KFLOP JP5 to KSTEP JP26 (not JP36) with a simple 1:1 RJ45 cable. #2 Kanalogs 8 differential receivers on Kanalog JP2 are converted to single ended signals and come out Kanalog JP9 and normally connect to KFLOP JP5, but since KFLOP JP5 is not available, you must wire them with a custom cable to KFLOP JP6. Then all 16 differential inputs on Kanalog JP1 and JP2 will be connected to KFLOP as IO 0-7 and IO26-35.
HTH Regards TK
| |
{kind=link}
{kind=link}